GPS網絡RTK系統的定位精度研究
來源:《測繪與空間地理信息》2018年第10期
作者:王俊超,吳潔
摘 要:通過對內插算法、線性組合算法以及虛擬基準站算法這3 種不同GPS 網絡RTK 系統算法的對比,確定了以平面內插算法為基礎的定位精度研究。考察了海拔高度、流動站的位置關系對定位精度的影響,并得出結論,對今后GPS 網絡RTK 系統中流動站和基準站的設置定位及研究有一定的參考作用。
關鍵詞:GPS-RTK 技術; 內插算法; 海拔高度; 定位精度
0 引言
全球衛星定位系統( 簡稱GPS,即Global PositioningSystem) 主要分為三大組成模塊,即負責空間部分的空間GPS 衛星、負責地面監控的系統以及負責接收GPS 信號的接收機[1]。該定位系統在諸多方面有著廣泛的應用,發展非常迅速。其中,應用非常廣泛的就是實時載波相位差分技術( 簡稱RTK,即Real Time Kinematic) ,其在海洋測量、地形勘測以及其他工程測量等方面應用都很廣泛[2]。RTK 系統中含有基準站和移動站,它們之間通過無線電臺通信聯絡,動態定位精度可達到厘米級。
GPS 網絡RTK 技術,作為傳統RTK 技術的升級版,有著無可比擬的優勢,它不僅能降低電離層中因自由電子引起的誤差、衛星軌道行駛的誤差及對流層中不均勻大氣引起的誤差等因素的影響,且不需要建立基準站,所有信息均可以通過控制中心對數據進行處理,既能最大限度地使成本得到降低,又能極大地提高處理的效率[3]。
數據處理部分作為整個系統最重要的核心組成部分,其主要算法包括內插算法、線性組合算法以及虛擬基準站法。
1 GPS 網絡RTK 系統
GPS 網絡RTK 系統的構成主要分為四大組成部分,即固定不動的基準站部分、負責數據處理的控制中心部分、負責數據通信的線路部分以及接受信息的用戶部分。這4 部分中,數據的處理承擔著最為重要的角色,對數據的傳輸和接收起到了非常重要的作用。數據處理中心和基準站以及流動站之間通過數據通信線路進行聯系,通信線路可以為有線線路或無線鏈接[4]。
GPS 網絡RTK 技術實現精準定位的過程如下: 首先,確定基準站的個數及設定位置,再以設定的基準站作為數據處理的基礎來計算定位的準確度,然后將誤差改正數據發送給系統,最后,由用戶部分對得到的定位信息進行實時的誤差改正,并獲得準確的定位信息。該技術中涉及差分GPS 技術,使用雙頻GPS 接收機,通過同步觀測法得以實現。它的測量中間站間距的有效距離最大可達到上百千米,定位精度可達到厘米級,已具備非常高的定位準確度。另外,該技術智能程度高、使用范圍廣、效率高、費用低,并且還能大大減弱由諸多原因引起的系統誤差,如衛星時鐘、衛星軌道、接收機時鐘等引起的誤差,以及對流層及電離層的延遲引起的誤差等。GPS 網絡RTK 技術是GPS 技術的歷史性突破,使得GPS 的應用領域得到較大的拓展。
GPS 網絡RTK 系統的數據采集和處理,采用的是動態測量法,工作的基本流程如圖1 所示。首先架設基準站和參考站,流動站隨機設站,并通過接收機發送即時信息到數據處理中心,數據處理中心同時也會接收來自基準站發送的信息,再根據接收到的信息進行處理和計算,用戶部分即能獲得最終經過誤差改正的較為精確的定位位置。
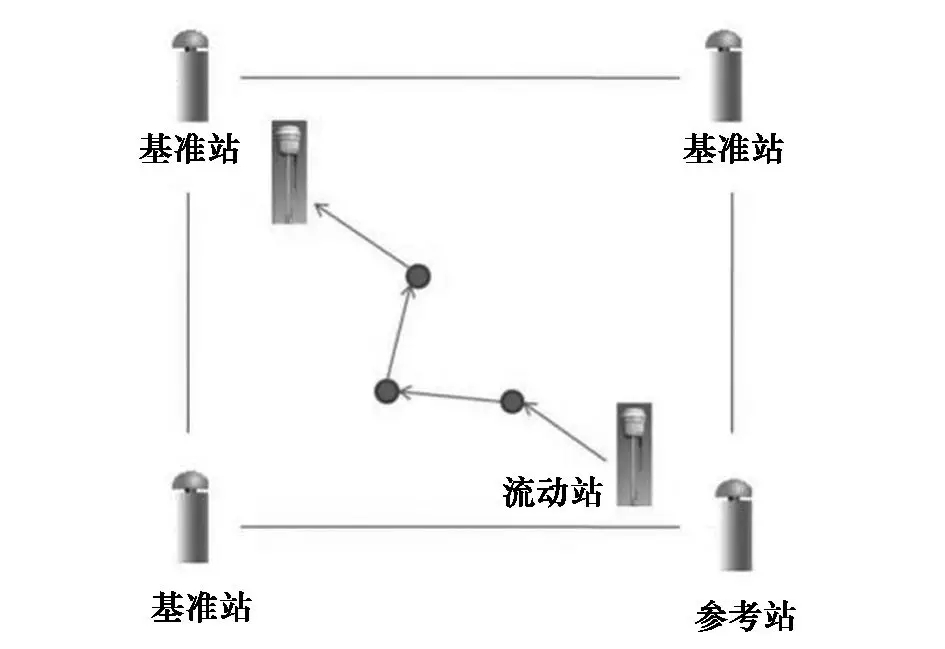
圖1 GPS 網絡RTK 系統動態測量圖
2 GPS 網絡RTK 系統的算法研究
數據處理中心中對數據的處理主要采用如下3 種算法: 內插算法、線性組合算法以及虛擬參考站算法。本文主要以內插算法為例。內插算法的基本原理為: 以單個已知點進行定位,得到流動站的近似三維坐標,再根據架設的基準站的坐標以及載波相位值,得到各個基準站的差分改正數,再通過內插得到載波相位的差分改正數,再由前面求得的流動站的近似三維坐標,就能得到流動站的準確坐標。
GPS 的數據處理均用到雙差觀測方程,公式如下:

式中,λ 代表波長,K 代表雙差,X 代表相位,p 代表衛星與用戶端的距離,N 代表整周未知數,d1 代表電離層延遲引起的誤差,d2 代表對流層延遲引起的誤差,d3 代表偏離真實值的多路徑誤差,σ 為測量噪聲。
以公式( 1) 為基礎,假設3 個流動站與1 個基準站的位置如圖2 所示,以基準站1 作為參考站采用內插法的計算方法進行推導。令等式左邊
λ·( KХ+KN) -Kp = KR ( 2) ,
則有公式

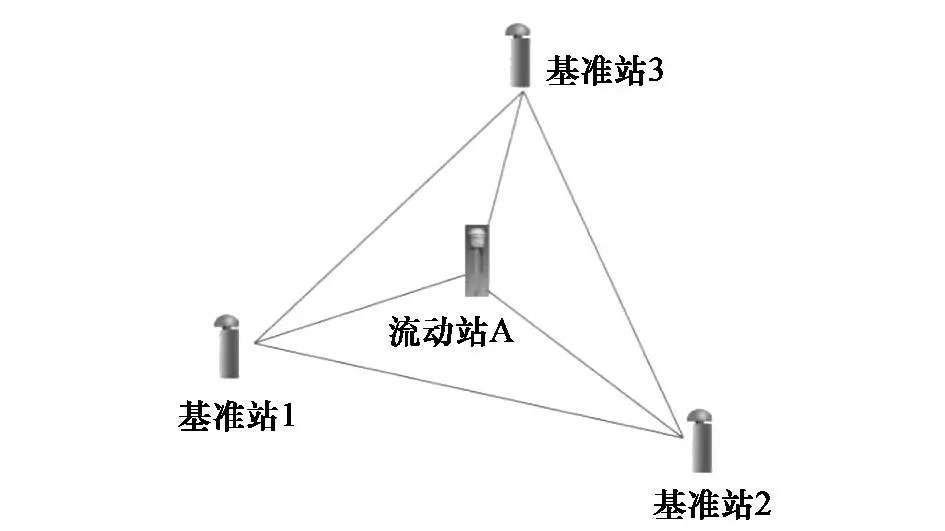
圖2 基準站1、2、3 與流動站A 的位置圖
由公式( 2) 可知,KR 代表點位間雙差觀測值與雙差距離的差,也代表各種誤差之和。
設基準站1、2、3 的坐標分別為( x1,y1,z1 ) 、( x2,y2,z2 ) 、( x3,y3,z3 ) ,則流動站A 與基準站1 間有公式如下:

式中,i、j 為衛星編號。
由公式( 2) 可得:

求得 后,即可對雙差觀測相位
后,即可對雙差觀測相位 進行改正:
進行改正:

由此可知,求得改正后的 ,隨即得到雙差觀測方程,并以該方程為基礎建立流動站偏離真實值的誤差方程,由此得到流動站坐標的誤差值Δx、Δy、Δz,最終即可得到流動站的準確坐標。
,隨即得到雙差觀測方程,并以該方程為基礎建立流動站偏離真實值的誤差方程,由此得到流動站坐標的誤差值Δx、Δy、Δz,最終即可得到流動站的準確坐標。
3 海拔高度及流動站位置對坐標準確度的影響
通過從內插算法推導得到流動站的精準坐標的過程,可以得出引起流動站A 偏離真實值產生誤差的主要原因有基準站與流動站間相對的布設方位,流動站的設定位置,基準站坐標的計算誤差,衛星的星歷、坐標誤差等。由于內插算法中的第一步就是要獲得流動站的坐標( xA,yA,zA ) ,因此,流動站的布設地點以及流動站位置,是獲得流動站準確坐標的一個重要的影響因素。
為了考察流動站的布設地點( 主要是探討海拔高度的不同) 以及流動站位置的準確度對定位精度的影響,我們以海拔較高的麗江( 2418 m) 及海拔較低的天津( 3.3m) 為實驗地點,進行實地考察。以圖2 所示的流動站與基準站的布設圖為基準,分別在麗江以及天津一個空曠的地點上布設3 個基準站、1 個流動站,并以上文討論的內插算法為數據處理方法,來討論海拔高度及流動站位置( x1,y1,z1 ) 對最終流動站位置偏離真實值的誤差的影響。
首先,為考察內插算法計算結果的準確度,我們利用一些軟件程序,如Matlab 等仿真軟件,對實驗過程進行仿真練習,獲得的數據結果如圖3 所示。
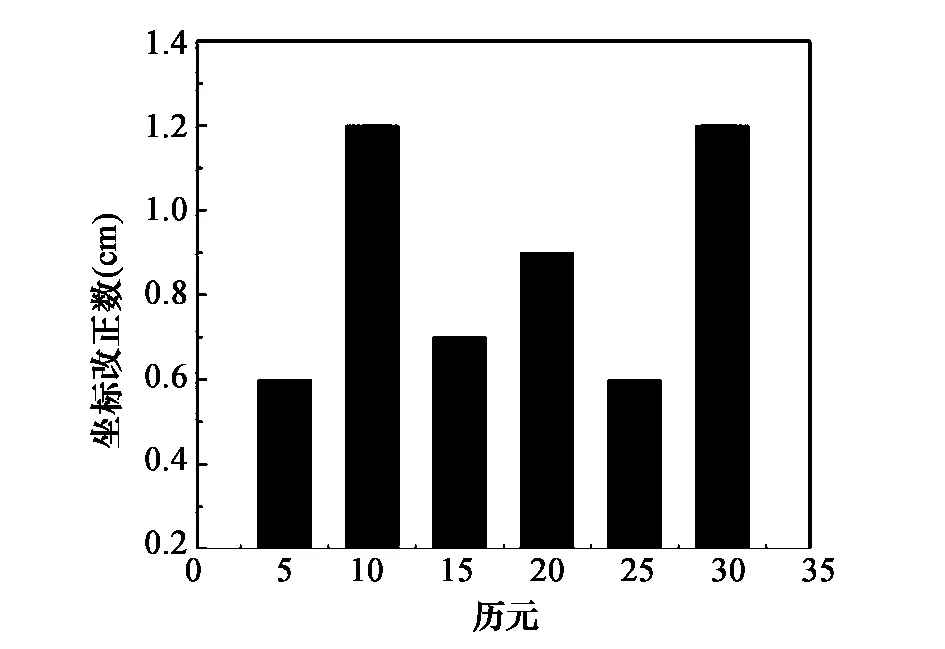
圖3 內插算法計算結果準確圖
由圖3 可知,采用內插算法計算而得的流動站坐標值的偏離誤差均較小( 均≤1.2) ,由此說明我們由誤差偏離值算法即內插算法,即可以得到較為精確的流動站坐標值,降低各種誤差產生的影響。內插算法計算模型可靠,為接下來實驗數據的準確度提供了保證。
為了降低流動站位置對定位精度的影響,我們分別對麗江及天津兩個海拔差距較大的城市采用相同的流動站與基準站的點位關系進行考察,并對由內插法計算出的流動站坐標與實際坐標的差值進行了對比分析,其數據如圖4 所示。
由圖4 可得,在麗江測出的流動站的平均誤差約為2.5 cm,在天津測出的流動站的平均誤差約為5.45 cm,再根據兩地海拔,麗江2 418 m,天津3.3 m,可得海拔越低對定位精度的影響越大,誤差越大。因而,海拔高的地區其定位精度相對而言更準確些。
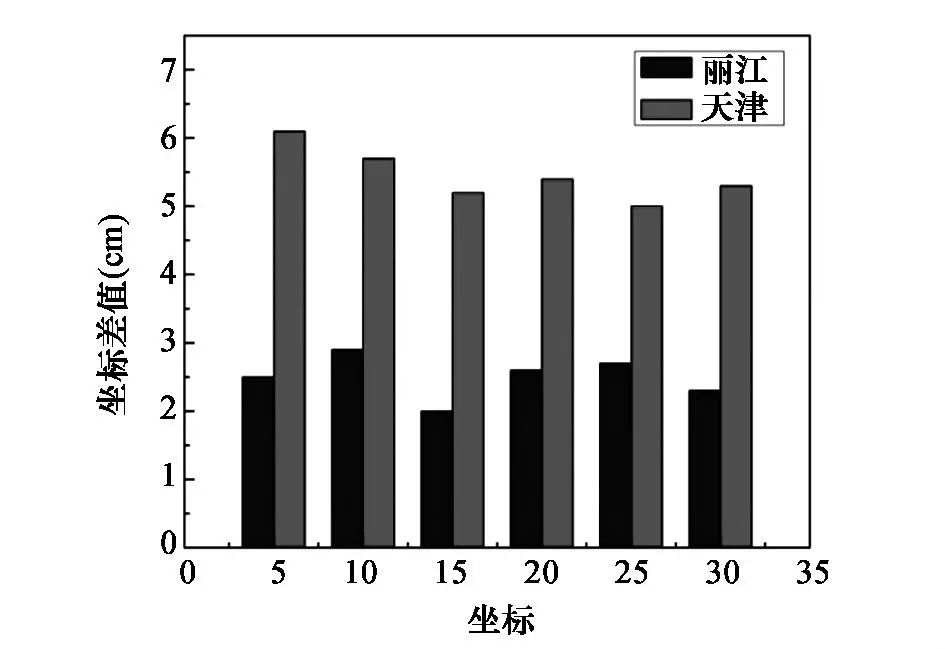
圖4 海拔高度對定位精度的影響
4 結束語
本文采用通過內插算法對流動站的定位精度進行研究,考察了內插算法對研究流動站定位精度的準確度,并且研究發現,海拔越高的地區,其GPS 定位精度越高,對今后GPS 網絡RTK 系統中流動站和基準站的設置定位有一定的指導作用。
參考文獻:略
聲明①:文章部分內容來源互聯網,如有侵權請聯系刪除,郵箱 cehui8@qq.com
聲明②:中測網登載此文出于傳遞更多信息之目的,并不意味著贊同其觀點或證實其描述,文章內容僅供參考。
加群提示:我們創建了全國32個省份的地方測繪群,旨在打造本地測繪同行交流圈,有需要請聯系管理員測小量(微信 cexiaoliang)進群,一人最多只能進入一個省份群,中介人員勿擾