�к��_���S���⌍�����g���ǻ۽�ͨ�еđ���
���S���⌍�����g���ǻ۽�ͨ�еđ���
�ṩ��ͨҪ�ؿ��ٸ�Ч�IJɼ���̎�����g�ֶΣ��ṩȫҪ�ؾC�Ͻ�ͨ��Ϣ���ǻ۹���ϵ�y(t��ng)�����F(xi��n)���S������ҕ���Y�a(ch��n)����ƽ�_/�Y�a(ch��n)�ղ�ƽ�_���Լ����ڸ߾��Ȝy�L���g�ĵ�·�ĔU�����������ޡ�������յȹ��̜y�����á�ͬ�r߀���Ԟ�߾��ȵ�·���S��ģ����ͨBIM-GIS���á��߾����Ԅӌ������o���{���T�ཻͨ�����ṩ����Ĕ�(sh��)��(j��)�ͼ��g֧�֡�
�������
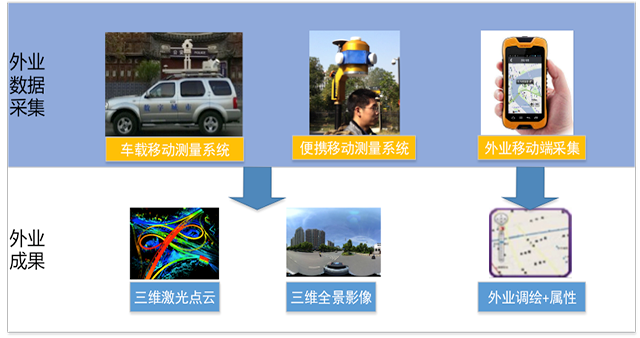
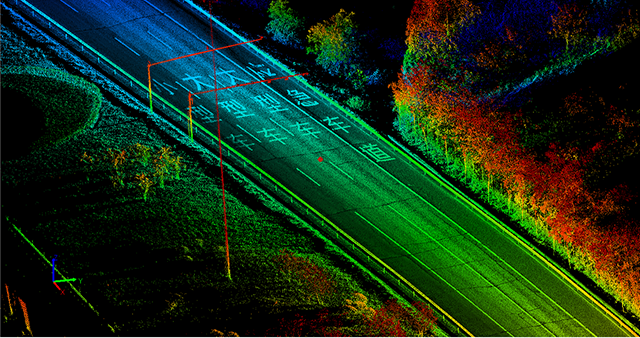
���S����ȫ���ƄӜy���ǽ����d���һ�N���١���Ч���ǽ��|ʽ�Ĝy�L���g�����ڙC��܇���b��GPS��ȫ��λϵ�y(t��ng)����ȫ�����C�����S�������x����λ���ˑT�Ԍ���ϵ�y(t��ng)�Ȃ��������O�䣬��܇�v�������M֮�У����ٲɼ���·�����Ե���ĸ���Ӱ�����c�ƣ�������(j��)���N������Ҫ�M�и��NҪ���e�ǵ�·����Ҫ�ص������Εr�İ���y����������·���ľ���߅��λ�����ˡ�Ŀ�˵����λ�����ˡ�·��܇�����������������ߡ���ͨ��־����·�Oʩ�ȡ�
��·��Ϣ�ղ��c�������w�������£�

��(sh��)��(j��)�ɼ�
��I(y��)��(sh��)��(j��)�ɼ��ǬF(xi��n)�����A������I(y��)��(sh��)��(j��)�ɼ��ϣ����������ĿҪ��Ĕ�(sh��)��(j��)�ɼ�Ҏ(gu��)���M�С���I(y��)��(sh��)��(j��)��Ϣ�ɼ�һ�����Ȱ����Ŀ�IJɼ�Ҫ���ƶ��ɼ������������Ќ����_�ɼ��Ĕ�(sh��)��(j��)���ȡ���(sh��)��(j��)��(n��i)�ݡ���͵���Ϣ����Ҏ(gu��)�������ɼ������̡�
��I(y��)�ɼ�����܇�d�����ƄӜy��ϵ�y(t��ng)�ɼ�����������ϵ�y(t��ng)�ɼ�����I(y��)�{(di��o)�L�a�ɣ����ڿ�ͨ܇�ֵ����Ԕ�(sh��)��(j��)����Ҫ����܇�d�����ƄӜy��ϵ�y(t��ng)�M����I(y��)��(sh��)��(j��)�ɼ������������o��������������������܇�v�o�����ĵ�·�^(q��)���Լ�һЩ���cȫ��վ�c������λ�ã��t��Ҫ�����˹��a�ɵķ�ʽ�M��������(sh��)��(j��)�ɼ���
���w���ԣ���I(y��)�ɼ����̷֞������A�Σ��քe��ǰ�ڜʂ��A�Ρ���(sh��)��(j��)�ɼ��A���Լ���(sh��)��(j��)�����A�Ρ�
��(sh��)��(j��)���a(ch��n)
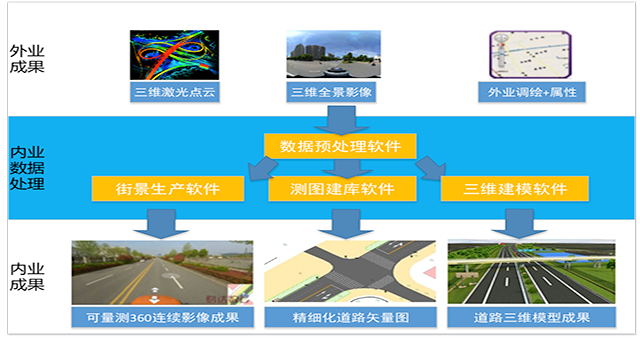
��(n��i)�I(y��)̎����Ҫ����ԭʼ��(sh��)��(j��)�A̎������·��ʾ���ƵȔ�(sh��)��(j��)��ȡ���������S��(sh��)��(j��)���a(ch��n)���Լ����Ԕ�(sh��)��(j��)�{(di��o)�L��䣺
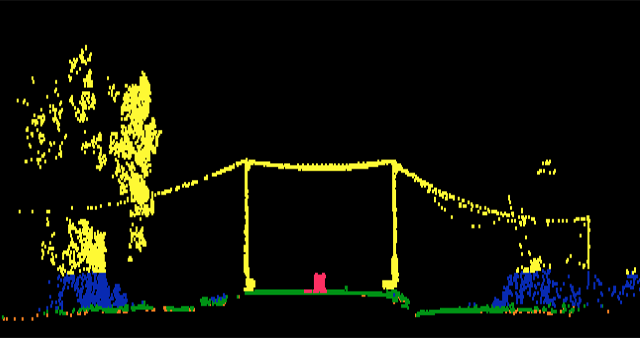
ԭʼ��(sh��)��(j��)�A̎����Ҫͨ�^��(sh��)��(j��)�A̎��ܛ����HD Scene����HiScan-S�@ȡ��ԭʼ��(sh��)��(j��)�M���ںϽ���̎����ݔ�������˵��c���Լ����c������˵�ȫ��Ӱ��Ӱ���c�ƣ���
����(j��)�c������˵�ȫ��Ӱ�����g�ɹ���(sh��)��(j��)��ͨ�^�c�Ɣ�(sh��)�֜y�Dܛ����HD ptCloud Vector forArcgis������·߅������·���g������ʾ���ƵȽ�ͨ��·Ҫ�ؔ�(sh��)��(j��)���g��Ϣ��ȡ������ݔ���õ����Sʸ���D��(sh��)��(j��)��
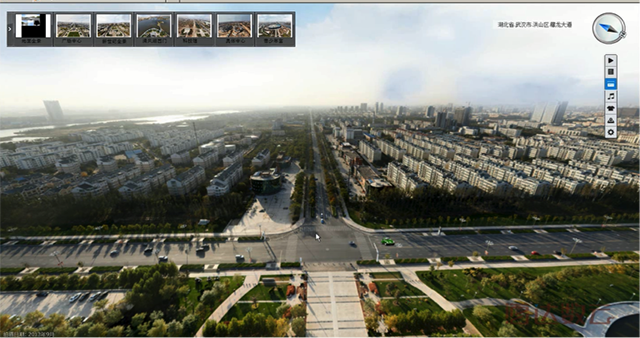
�������S��(sh��)��(j��)���a(ch��n)��Ҫͨ�^���S������(sh��)��(j��)���a(ch��n)ܛ����HD ptCloud StreetView���M�о�·܉�E�������S��Ƭ��ȡ���[˽̎����ȫ����Ƭ�ȣ�����̎����ijɹ���(sh��)��(j��)�������S����Ӱ��죻
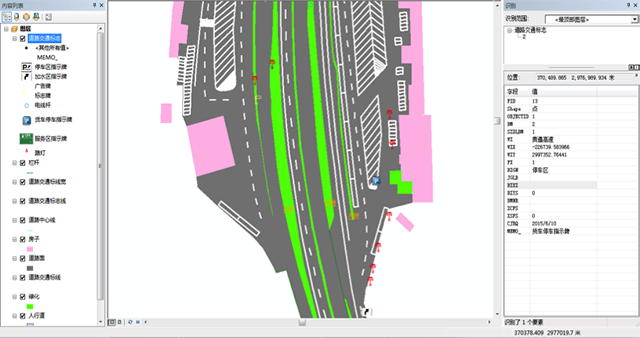
������ȡ�õ��Ķ��Sʸ���D��(sh��)��(j��)�������еČ����ǿ��ԏ��c���cӰ��(sh��)��(j��)����ȡ���ģ������ʾ�Ƹ߶ȵȣ���Ҳ���ںܶ������������I(y��)�{(di��o)�L�����ģ������·���O��λ�����O�r�g�ȡ������Ҫ�M�������ă�(n��i)�I(y��)��·�n����ԃ����Arcgis�Ќ������Č�����Ϣ���ݔ�뵽�����ֶ��У��γ������Ķ��Sʸ���D�c���Ԏ졣������Ҫ�����Sʸ���D�M�Йz�鹤���;ֲ�������
���ܑ���
��ҕ���C�ϑ��÷���ƽ�_

��ͨ�Y�a(ch��n)Ҫ�ع���
��·������ռ��ĔU��
��ͨ�ϵK��O(ji��n)�y
���S��ҕ����ͨ�茧����
���٣����²��փ�(n��i)�݁�Դ��(li��n)�W(w��ng)�������֙�Ո(li��n)ϵ�h�����]�� cehui8@qq.com
���ڣ��Мy�W(w��ng)���d���ij��ڂ��f������Ϣ֮Ŀ�ģ�������ζ��ٝͬ���^�c���C��������������(n��i)�݃H��������